Automatyzacja, Inżynieria oprogramowania, Sprzet
Elektrycznie bujane łóżeczko, cz.2, Druga wersja łóżeczka bujanego z czujnikami pozycji
Jest to kontynuacja poszukiwań najlepszego rozwiązania mechaniczno-elektroniczno-informatycznego łóżka bujanego dla dziecka.
Po wykonaniu pierwszego modelu pora na kolejny, ulepszony model zapraszam do zapoznania się ze szczegółami
Przed wykonaniem następnych kroków, chciałbym podsumować to co udało się wykonać dotychczas:
Table of Contents
Podsumowanie dotychczasowych prac
- Model mechaniczny pozwalający na ruch wachadłowy kołyski, z bezpośrednim przełożeniem układu napędowego silnika na oś kołyski
- elektronika sterująca silnik prądem 3A ze sterownikiem TB6560 dla silników krokowych dwufazowych
- program sterujący w języku Python na kompter RPI 3. Program wykonuje algorytm dla ruchu falowego kołyski z uwzględnieniem bezwładności kołyski na krańcach ruchu
link do poprzedniego artykułu:
https://tom.sapletta.pl/pl/projekt-pl/elektrycznie-bujane-lozeczko-test-pierwszego-prototypu-z-silnikiem-krokowym-rpi-3-driver-tb6560/
Wnioski
Poprzez wykonanie prostego prototypu i kilkunastu prób i zmian w programie sterującym zaważyłem kilka fizycznych własności tego układu i możliwości jego ulepszenia:
Cechy bezpośredniego sprzęgnięcia osi silnika z kołyską łóżeczka
korzyści
- łatwość i szybkość montażu
wady
- spory chałas w tej aplikacji wynikający z konieczności stosowania maksymalnego prądu 3A, wykluczający możliwość zastosowania tego rozwiązania
- wymagany czujnik pozwalający pomiary bezwładności na skutek ruchu kołyski uwgzględniający zewnętrzne czynniki
Zastosowanie przekładni oraz paska z kołami zębatymi
to rozwiązanie niesie ze sobą inne korzyści oraz wady
korzyści
- przy stosowaniu przekładni silnik ma mniejsze obciążenie, stąd cichższa praca, tak ważna w tej aplikacji, obecnie koło zębate na silniku ma 16 do 40 na osi kołyski (przekładnia 2,5). Planuję zwiększenie do 60 zębów na osi kołyski aby uzyskać przełożenie 3,75
wady
- Nadal jest spory chałas, który w sposób pośredni został zmniejszony poprzez zastosowanie paska oraz stoperów, które pełnią rolę pochłaniacza drgań wywoływanych przez silnik krokowych, w kolejnym protototyie będzie konieczne zastosowanie lepszych rozwiązań pozwalających tłumić drgania
Oprogramowanie
Oprogramowanie zostało zoptymalizowane do ruchu wachadłowego.
została uwzględniona przekładnia na kołach zębatych, która wymusza zastosowanie 2,5 razy więcej kroków przy takim samym ruchu jak poprzednio z bezpośrednim sprzężeniem osi silnika
kod źródłowy znajduje się na reposytorium Github
https://github.com/tom-sapletta-com/smallsleep
Czujniki bezdotykowe podczerwieni
Zastosowanie czujników bezdotykowych podczerwieni pozwala kontrolować ruch kołyski co jest istotnte przy bezwładności , kiedy silnik nie powinien pracować, pozwalając na bezwładny ruch kołyski.
Celem w obecnym projekcie jest napędzanie kołyski tylko w czasie gdy wykonuje ruch przyśpieszony w momentach zaznaczonych na rysunku
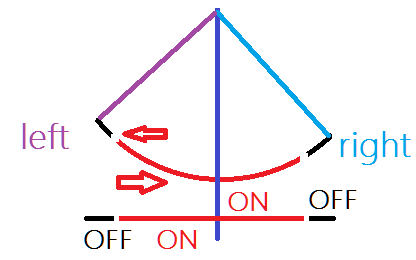
Rys.Przedstawia ruch wachadłowy uwzględniając bezwładność kołyski. W czarnych fragmentach ruchu silnik zostaje wyłączony, w czerwonej części napędza z całą mocą kołyskę do lewej lub prawej strony
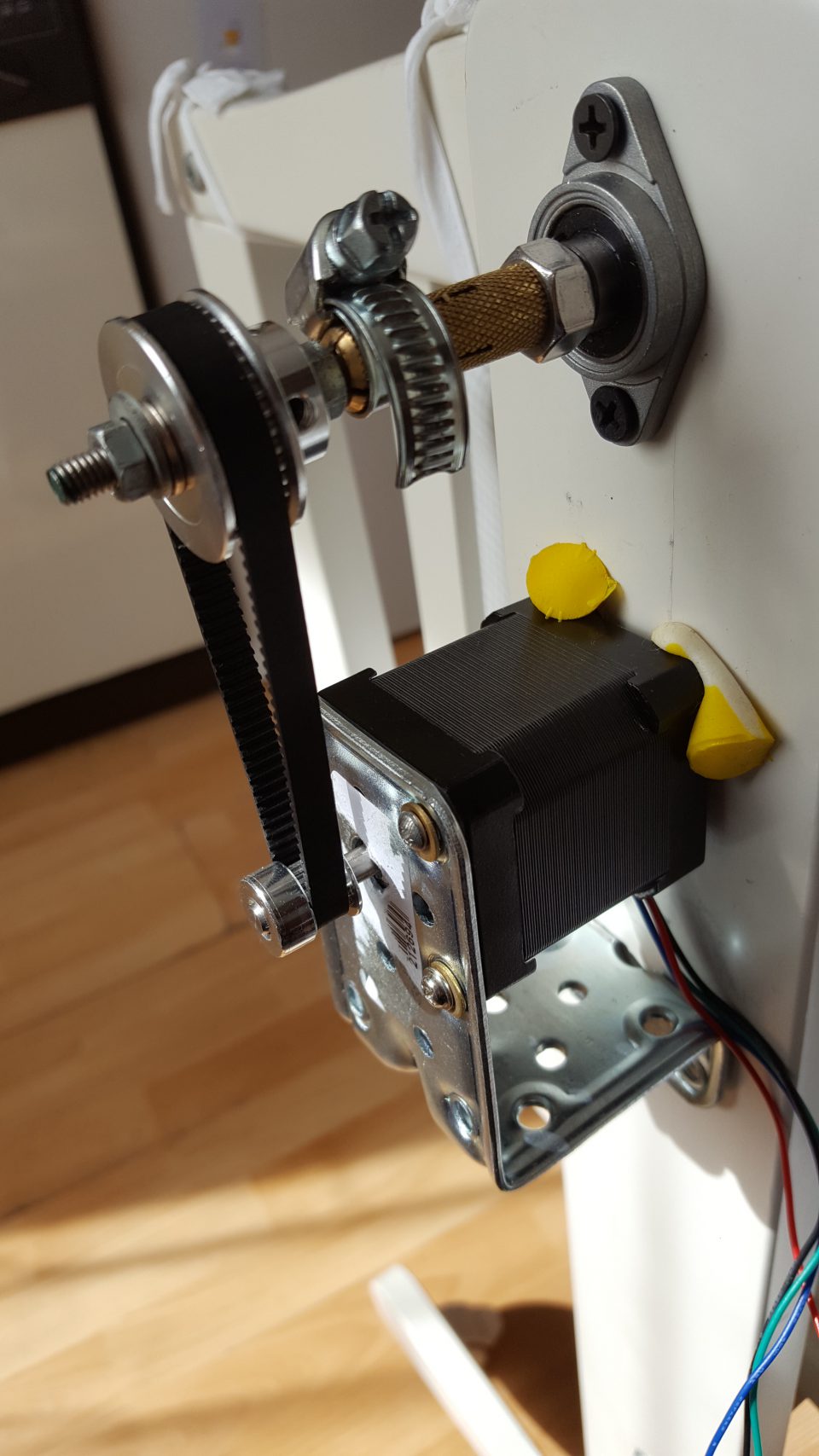
oś silnika, koło zębate, silnik krokowy
Moim pierwszym (mikro)komputerem był ZX-Spectrum a językiem programowania: Basic.
Od 2010 roku programuję zawodowo, objektowo i funkcjonalnie w architekturach monolitycznych i mikro-usługowych.
Obecnie tworzę architekturę ekosystemów dla liderów rynku w firmie Softreck.
- 🤔 Jak radzicie sobie z frustracją w pracy developera? - 24 listopada 2024
- Walidacja pomysłu SaaS - 29 lipca 2024
- Dlaczego liczba 2 jest idealna w IT? Analiza fenomenu dualności - 29 lipca 2024